| Autor |
Beitrag |
    
Erich

Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 00:35: | 
|
Hallo Leute.
Folgendes ist die Fragestellung:
Welche Matrix M dreht einen Vektor um den Winkel alpha=270° um die y-Achse und danach um den Winkel beta=120° um die z-Achse?
Ich wäre für Eure Hilfe sehr dankbar. Ich habe soetwas mal gemacht (war irgendwas mit Tensoren), kann mich aber nicht mehr erinnern wie es geht.
Erich |
orion (orion)
Erfahrenes Mitglied
Benutzername: orion
Nummer des Beitrags: 279
Registriert: 11-2001
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 08:17: |
|
Erich :
Die Matrix
A = ([cos(alpha),0,-sin(alpha)],[0,1,0],
[sin(alpha),0,cos(alpha)]) (lies zeilenweise)
bewirkt die Drehung um die y-Achse mit
Drehwinkel alpha, die Matrix
B = ([cos(beta),-sin(beta),0],
[sin(beta),cos(beta),0],[0,0,1])
dreht entsprechend um die z-Achse. Nun ist
M = B A.
mfg
Orion
|
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 09:06: |
|
Hallo Erich,
das geht auch ohne Tensoren!
M=
0, -1/2*W(3), 1/2
0, -1/2, -1/2*W(3)
1,0,0
Für eine beliebigen Vektor u erhält man den gedrehten Vektor u'
durch:
u' = M*u |
heidi
Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 10:09: |
|
@Hanspeter!
wie bist du denn darauf gekommen ohne den oben beschriebenen Weg? Was ist ein Tensor? |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 11:28: |
|
Hallo Heidi,
die Spalten der Matrix M sind der Reihe nach die Bilder der Einheitsvektoren e1,e2,e3.
e1=(1,0,0) , usw
|
Heidi
Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 11:45: |
|
@hanspeter!
dann muß die Abbildung aber gezeichnet werden können, damit man die Bilder der einheitsvektoren der kanon. Basis so einfach weiß, oder? |
Erich
Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 17:01: |
|
Ich danke Euch für Eure Hilfe. Ich habe das jetzt mal nachvollzogen, und bekomme bei der Lösung von Orion folgendes:
[0 ; -0,6428 ; -0,7660]
[0 ; -0,7660 ; -0,6428]
[-1; +0,0000 ; +0,0000]
Ist das richtig?
Ich habe es mit dem von Hanspeter verglichen, aber das stimmt nicht überein.
Erich
|
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Samstag, den 29. Juni, 2002 - 18:41: |
|
Hallo Erich und Heidi,
Ja, man sollte die Drehung kanonischen Vektoren skizzieren (wenn man nicht ein Genie im Kopfrechnen ist!).
Das Ergebnis von Erich kann nicht stimmen.
Orion hat die Drehung in zwei Schritten durchgeführt, was durchaus zulässig ist.
Sein Resultat unterscheidet sich von meinem nur durch ein Vorzeichen.
Er hat eine der Drehungen in die andere Richtung durchgeführt.
Rechtsdrehung:
die positiven Achsen bilden ein Rechtsystem wie fogt:
x-y-z-Achse
y-z-x-Achse
z-x-y-Achse
Wird der Vektor e3=(0,0,1) um den Winkel a um die y-Achse gedreht, so erhält man:
e3'=(+sin(a), 0, cos(a))
dies muss die 3.Spalte der Matrix A sein.
|
Erich
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 00:00: |
|
1. Ich muß mich entschuldigen, ich habe einen falschen Wert für Beta eingetragen :-( daher komme ich auch nicht auf die entsprechende Matrix.
2. Habe mir ein Mathebuch von Lothar Papula besorgt. Darin ist das Thema zwar nur angerissen, aber dennoch steht dort für 2-reihige Matrix:
[cos(a);sin(a)]
[-sin(a);cos(a)]
Wenn ich das jetzt auf 3-reihige anwende bekomme ich das Ergebnis von Hanspeter, aber mit unterschiedlichen Vorzeichen:
[0;0,5*W(3);0,5]
[0;-0,5;0,5*W(3)]
[1;0;0]
Und noch etwas. Könnte mir vielleicht auch jemand sagen, warum ich M=B*A rechnen muß und nich M=A*B. Schließlich will ich ja erst um y-Achse drehen, und dann um z-Achse.
So, jetzt raucht mir aber die Birne, und ich gehe erst einmal in die Heija. Ich wäre noch recht dankbar, wenn jemand einen Link auf eine verständlich Seite zu dem Thema veröffentlichen würde. Eine Suche in Google bezüglich kanonischer Vektoren ergab nur viel sehr trockenes Zeug.
Vielen dank im voraus
Erich |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 07:33: |
|
Hallo Erich,
die Drehmatrix von Papula ist falsch wie Du Dir selbst leicht überlegen kannst.
(Wenn pos. x-Achse nach rechts und pos. y-Achse nach oben: dann ist +a gegen den Uhrzeigersinn!)
Zu: M=BA
Es handelt sich bei Drehmatrizen um einen Spezialfall von "Linearen Transformationen".
Solche Transformationen können immer durch eine Matrix A repräsentiert werden.
Um einen beliebigen Vektor x zu tranformieren gilt:
x' = Ax (nicht:xA)
Unterwirft man nun den Vektor x' einer weiteren Transformation mit der Transformationsmatrix B, so erhält man:
x" = Bx' = B(Ax) = BAx =(BA)x = Mx
|
Erich
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 10:41: |
|
Jetzt bin ich leider total verwirrt. Ich wäre Dir, Hanspeter, recht dankbar, wenn Du mir mal bitte die Matrix A aufschreiben würdest.
Wenigstens habe ich das mit dem M=B*A geschnallt.
Erich |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 19:20: |
|
Hallo Erich,
Drehung um 270° um die y-Achse:
Die kanonischen Basisvektoren sind:
e1=(1,0,0)
e2=(0,1,0)
e3=(0,0,1)
Drehung von e1: (bleibt in der z-x-Ebene)
e1'=(0,0,1)
Drehung von e2: (bleibt in der y-Achse)
e2'=(0,1,0)
Drehung von e3: (bleibt in der z-x-Ebene)
e3'=(-1,0,0)
Matrix A hat e1', e2', e3' als Spalten:
A=
0, 0, -1
0, 1, 0
1, 0, 0
Ein beliebiger Vektor u=(u1, u2,u3)
wird gedreht zu
u'= Au = (-u3, u2, u1) |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 19:23: |
|
Hi Erich,
ich habe vergessen:
um korrekt zu sein müßten alle Vektoren als Spaltenvektoren geschrieben sein. Es ist aber zeilenweise einfacher zu tippen. |
Master
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 22:25: |
|
Hallo Hanspeter,
kleiner Tip:
Schreib einfach ein ^T (für transponiert) dahinter, also
(1,0,0)^T=(1)
_________(0)
_________(0)
Kann man erkennen, wie das gemeint ist?
Ist eine übliche Schreibweise, wenn man Spaltenvektoren darstellen will!
Master |
Erich
Unregistrierter Gast
| | Veröffentlicht am Sonntag, den 30. Juni, 2002 - 23:10: |
|
Also sähe A dann so aus (so wie man sie auch auf dem Papier schreiben würde):
Zeile 1: [cos(a);0;-sin(a)]
Zeile 2: [0;1;0]
Zeile 3: [sin(a);0;cos(a)]
Dem entsprechend dann auch B:
Zeile 1: [cos(b);-sin(b);0]
Zeile 2: [sin(b);cos(b);0]
Zeile 3: [0;0;1]
Hoffe, daß ich jetzt richtig habe.
Erich
|
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Montag, den 01. Juli, 2002 - 08:40: |
|
Hallo Erich,
Deine Matrix A ist identisch mit der von Orion.
Sie ergibt sich wenn man um den negativen Winkel a um die y-Achse dreht.
Positiver Drehsinn ist:
Da Du unter "Mathematik für Ingenieure" schreibst, weißt Du sicher wie ein Winkelgeschwindigkeitsvektor aussieht.
Wenn also die z-x-Ebene um die y-Achse rotiert, dann muß der Winkelgeschwindigkeitsvektor in die positive y-Richtung zeigen!
Das ist eine positive Drehung.
|
Erich
Unregistrierter Gast
| | Veröffentlicht am Montag, den 01. Juli, 2002 - 10:18: |
|
Tut mir leid, damit kann ich leider nicht dienen. 3.Semester Maschinenbau (FH). Da ist noch nix mit Winkelgeschwindigkeitsvektoren. Ich wäre Dir recht verbunden, wenn Du mir mal die beiden Matizen aufschreiben würdest, aber nicht mit +1/-1, sondern mit +cos(a/b)/-cos(a/b) und +sin(a/b)/-sin(a/b). Aus den Unterlagen mit den Tensoren werde ich leider auch nicht mehr schlau.
Erich |
Erich
Unregistrierter Gast
| | Veröffentlicht am Montag, den 01. Juli, 2002 - 11:38: |
|
Ich habe gerade mal eben was nachgelesen bezüglich dem Vektor. Und siehe da, der Winkelgeschwindigkeitsvektor muß in unserem Fall parallel zur positiven y-Achse sein.
Wenn ich also sagen würde -a dann wäre er in die negative y-Richtung.
Wenn ich das jetzt alles recht verstanden habe, dann wird aus der Matrix:
Zeile 1: [1;0;0]
Zeile 2: [0;1;0]
Zeile 3: [0;0;1]
bei einer Drehung von 270° um y die Matrix:
Zeile 1: [0;0;1]
Zeile 2: [0;1;0]
Zeile 3: [-1;0;0]
Das habe ich dadurch nachvollzogen, daß ich es auf Papier aufgemalt habe. Das mit den Vorzeichen (vor dem cos und sin) habe ich noch nicht geschnallt!
Bei der z-Achse wäre der positive Winkelgeschwindigkeitsvektor die positive z-Achse. Richtig?
Nach dem ganzen aufzeichnen bin ich mal auf die Idee gekommen, ob das ganze vielleicht auch quadrantenabhängig sein könnte. Ist dem so?
Ich habe jetzt hier soviel herumprobiert, und komme einfach nicht auf ide richtige Lösung. |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Montag, den 01. Juli, 2002 - 18:03: |
|
Hallo Erich,
wir stimmen wohl nie überein:
Nochmal:
eine Drehung (um die y-Achse) kann durch eine Transformationsmatrix A dargestellt werden.
Man erhält diese Matrix, indem man ihre Spalten gleich den gedrehten kanonischen Basisvektoren macht.
Bei einer Drehung um den Winkel a (im positiven Sinn) lautet die Matrix
A=
cos(a), 0, sin(a)
0, 1, 0
-sin(a) 0, cos(a)
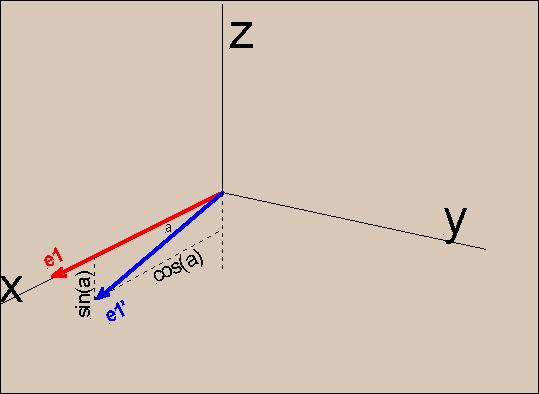
Aus der Skizze siehst Du, wie man aus dem roten Vektor e1=(1,0,0)
den gedrehten blauen Vektor e1'=(cos(a), 0, -sin(a)) erhält.
Die Koordinaten von e1' sind dann die Einträge der ersten Spalte von A.
Genauso verfährt man mit e2 und e3.
Die Matrix B (Drehung um die z-Achse) ist von Orion angegeben.
Die Matrizen gelten für alle Quadranten.
Anmerkung: nacheinander ausgeführte Drehungen dürfen nicht vertauscht werden.
Dies demonstriert man immer mit einem Buch:
Lege ein Buch auf den Tisch.
Drehe es um 90° nach hinten und dann um 90° nach links.
Jetzt den gleichen Versuch:
Zuerst das Buch um 90° nach links drehen und dann um 90° nach hinten!
Das Resultat ist NICHT gleich!
|
Erich
Unregistrierter Gast
| | Veröffentlicht am Dienstag, den 02. Juli, 2002 - 00:02: |
|
Danke für die erklärende Zeichnung. Wenn ich mir die aber anschaue, dann drehst Du nicht im mathematisch positiven Sinn, sondern negativ. Im positiven Drehsinn müßte e1' zwischen +x und +z liegen. Daraus folgere ich dann,
e1'=[cos(a);0;sin(a)].
Wenn ich mir die Rechte-Hand-Regel einmal zur Hilfe nehme, und im mathematisch positiven Drehsinn um die positive y-Achse (Zeigefinger) drehe, dann wandert der Daumen dahin, wo vorher der Mittelfinger war (+x -> +z) und der Mittelfinger nach -x (+z -> -x). Die y-Achse bleibt von allem unberührt.
So wie ich das sehe, hast Du in die falsche Richtung gedreht; nicht im Gegenuhrzeigersinn.
Erich |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Dienstag, den 02. Juli, 2002 - 07:56: |
|
Hallo Erich,
versuch doch Deine Regel mal mit der Drehung um die z-Achse, dann siehst Du, daß sie falsch ist!
Wenn man in Richtung +z-Achse blickt, dann dreht die x-y-Ebene IM UHRZEIGERSINN. Das nennt man eine Drehung in positiver Richtung. |
Gast2
Unregistrierter Gast
| | Veröffentlicht am Dienstag, den 02. Juli, 2002 - 18:40: |
|
Na, vielleicht hilft euch das weiter:
http://www.genista.de/manches/diplom/node5.html#SECTION00232000000000000000
Tschau
Gast2 |
Gast2
Unregistrierter Gast
| | Veröffentlicht am Dienstag, den 02. Juli, 2002 - 18:44: |
|
Sorry, war leider die falsche Seite. Aber sucht doch einfach mal im Internet, da lassen sich bestimmt Quellen finden, was man unter positiver Richtung versteht und wie die Drehmatrix dann aussehen muss!
Tschau
Gast2 |
Hanspeter
Unregistrierter Gast
| | Veröffentlicht am Dienstag, den 02. Juli, 2002 - 19:17: |
|
Hallo Gast2,
danke für die angebotene Hilfe.
Sie ist aber nicht nötig - die Sachlage ist klar wie dicke Tinte! |
Gast2
Unregistrierter Gast
| | Veröffentlicht am Dienstag, den 02. Juli, 2002 - 22:10: |
|
Hallo Hanspeter,
hatte keine Lust, mich in die Sachlage hineinzudenken und nachzugucken, wer denn nun Recht hat und wer nicht.
Die Hilfe war eigentlich eher weniger für dich gedacht als für Erich. Ich weiß nun wirklich nicht, wer genau denn hier nun Recht hat (bzw. ich will es gar nicht wissen).

Aber die Lösung ist im Internet doch gar nicht so schwer zu finden:
Man sucht nach "Drehmatrizen" oder ähnliches, eventuell schreibt man noch "+3-dimensional" oder sowas dran.
Vielleicht hast du ja Recht. Aber du hast Erich anscheinend immer noch nicht überzeugt!
THE PROOF IS LEFT TO THE READER 
Tschau
Gast2 |
Erich
Unregistrierter Gast
| | Veröffentlicht am Donnerstag, den 04. Juli, 2002 - 17:59: |
|
Hallo. Bin wieder da.
1. In der Matheprüfung kam keine Drehmatrix vor.
2. Ich habe die nette Dame von der Telefonnachhilfe angerufen. Sie kommt zu dem gleichen Ergebnis wie ich. Sie hat die Drehmatrix aus einem Formelbuch entnommen.
3. Ich habe mich, aufgrund des Hinweises von Gast2, mal bei Google nach Drehmatrizen erkundigt. Ergebnis: http://www.techfak.uni-bielefeld.de/ags/ti/personen/zhang/seminar/arbeiten-s01/3a/hausarbeit2.htm#_Drehmatrix
Mich wundert, daß die Matrix für die Drehung um x eine andere ist, als die für y aber gleich der um z. Ist es das, was Du, Hanspeter, mir die ganze Zeit versucht hast beizubringen?
Wenn dem so sein sollte, dann wäre ja die Information der Telefondame falsch gewesen.
Wenn ich das nun recht geschnallt habe, dann ist:
Bei:
A -> Drehung um x
B -> Drehung um y
C -> Drehung um z
folgt daraus:
A = C
B = A^T
Erich |
|